10. Adapting FastSLAM to Grid Maps
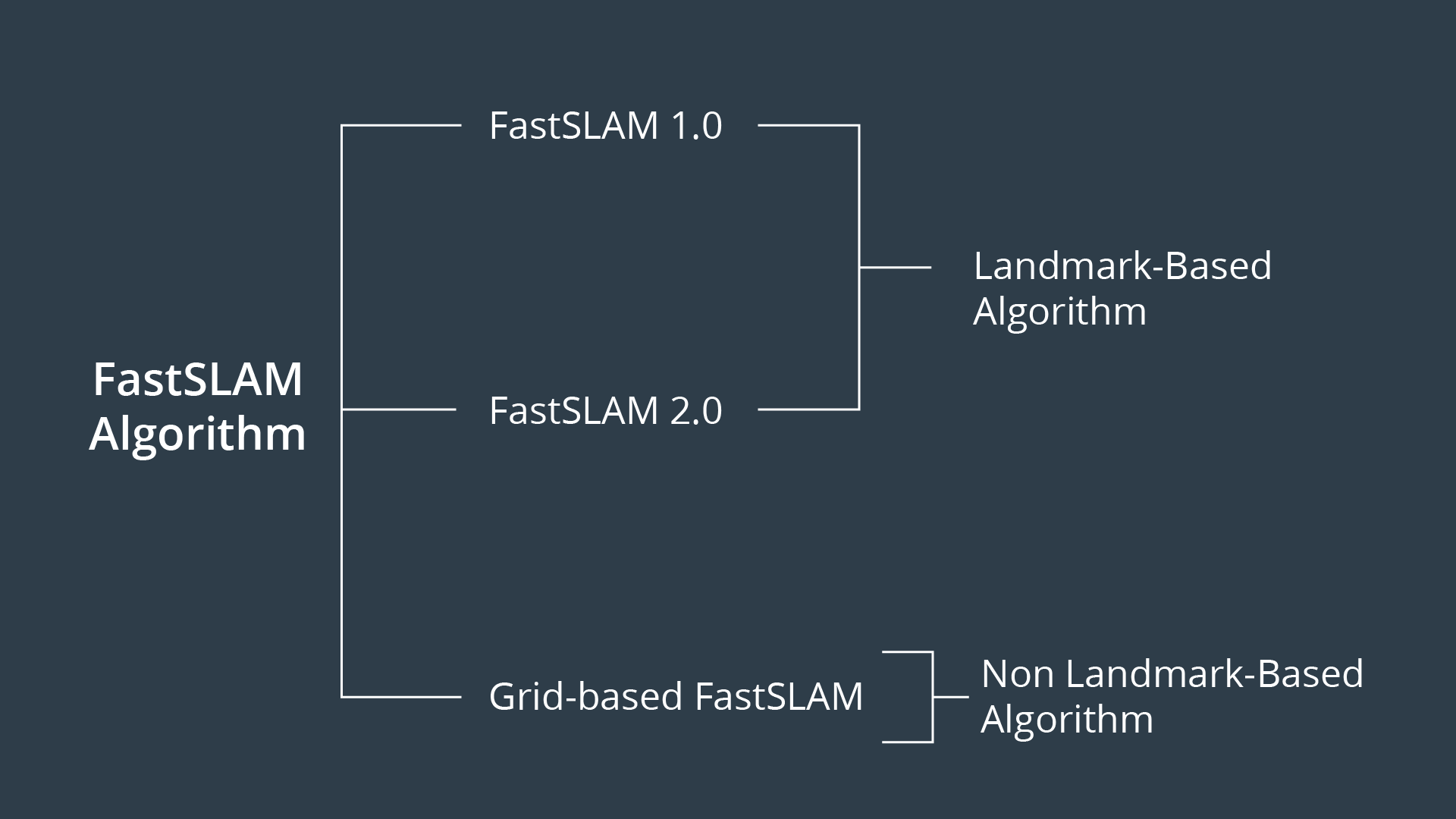
FastSLAM 1.0 & 2.0
The main advantage of the FastSLAM algorithm is that it uses a particle filter approach to solve the SLAM problem. Each particle will hold a guess of the robot trajectory, and by doing so, the SLAM problem is reduced to mapping with known poses.
But, in fact, this algorithm presents a big disadvantage since it must always assume that there are known landmark positions, and thus with FastSLAM we are not able to model an arbitrary environment. Now, what if landmark positions are unavailable to us? Are we still able to solve the SLAM problem?
Grid-based FastSLAM
Yes, with the grid mapping algorithm you can model the environment using grid maps without predefining any landmark position. So by extending the FastSLAM algorithm to occupancy grid maps, you can now solve the SLAM problem in an arbitrary environment. While mapping a real-world environment, you will mostly be using mobile robots equipped with range sensors. You’ll then extend the FastSLAM algorithm and solve the SLAM problem in term of grid maps.
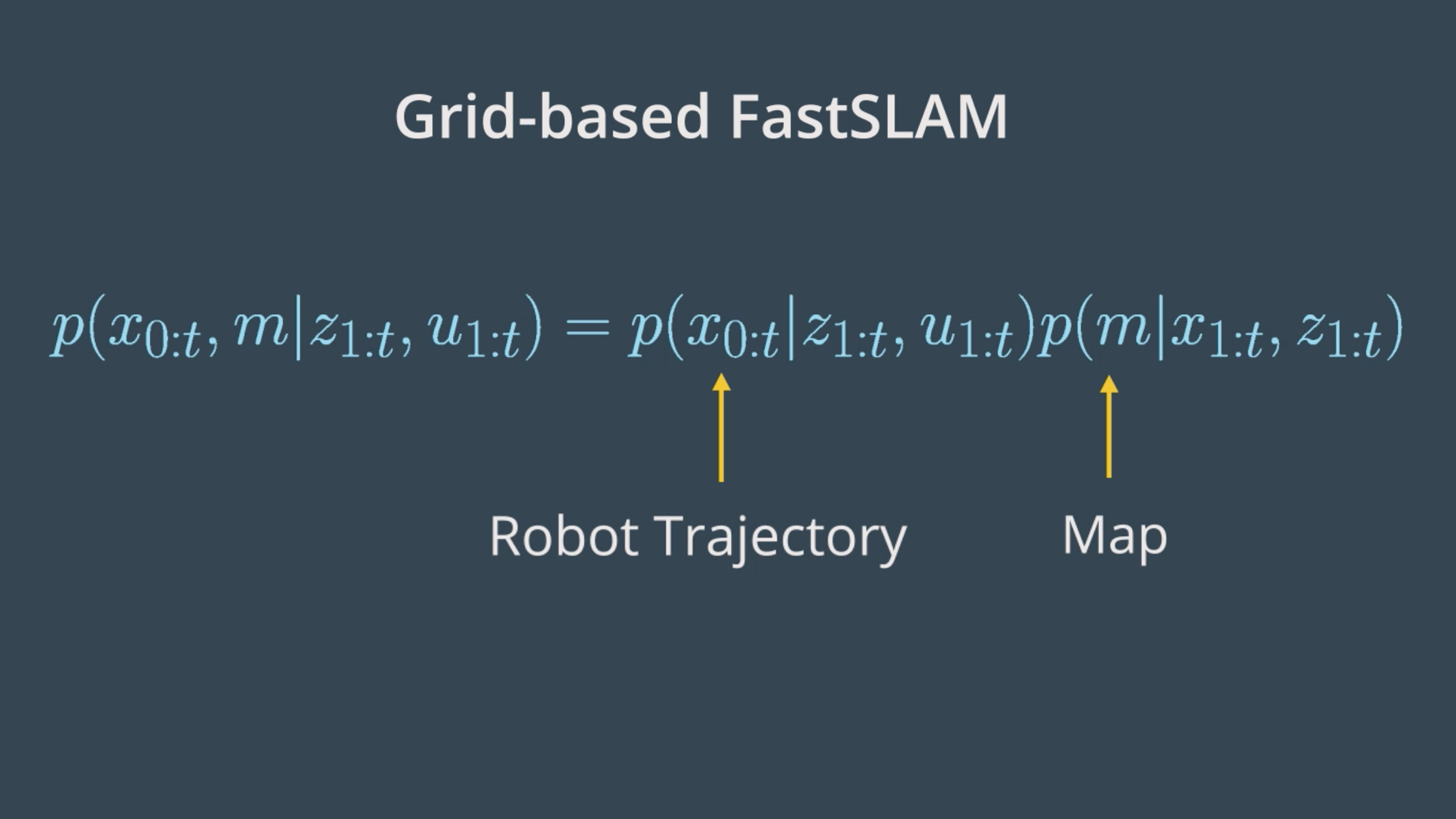
Robot Trajectory
Just as in the FastSLAM algorithm, with the grid-based FastSLAM each particle holds a guess of the robot trajectory.
Map
In addition, each particle maintains its own map. The grid-based FastSLAM algorithm will update each particle by solving the mapping with known poses problem using the occupancy grid mapping algorithm.
SOLUTION:
- MCL
- Occupancy Grid Mapping